История нашей компании
Как всё начиналось
Компания RoboDK была основана А́лбертом Нубиолой в январе 2015 года в результате отделения от лаборатории CoRo университета ETS в канадском городе Монреаль.
Отправной точкой для RoboDK стал день, когда один производитель из Новой Зеландии пожелал использовать наш продукт для настройки робота ABB в режиме фрезерования.

Лабораторные испытания
RoboDK создавался и испытывался в стенах лаборатории CoRo, которая оснащена большим количеством промышленных роботов и специализируется на прикладных исследованиях, что делает её одной из самых престижных робототехнических лабораторий в Канаде.

Дальнейшее развитие
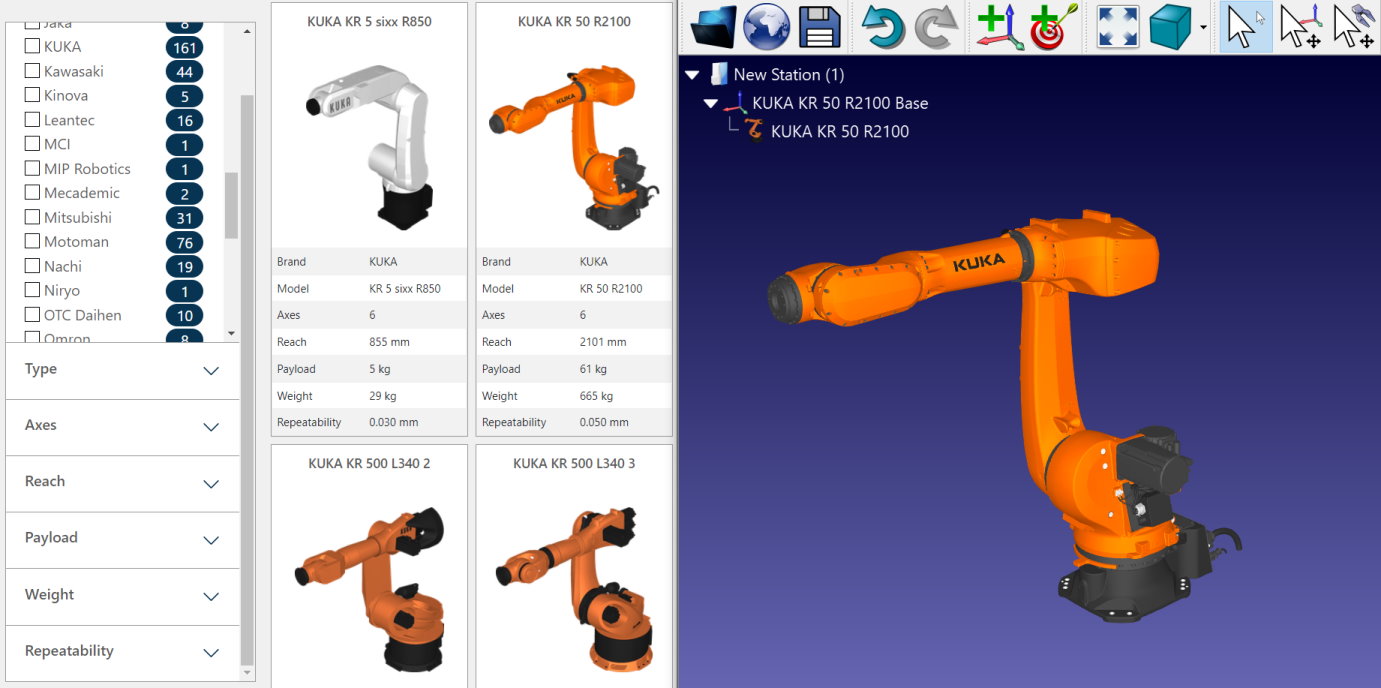
На момент запуска электронный каталог RoboDK насчитывал порядка 200 роботов от 20 разных производителей. Затем проект начал стремительно развиваться и на данный момент он используется в самых разных компаниях по всему миру: от небольших фирм до крупнейших корпораций.
Сейчас наш каталог содержит более 600 моделей промышленных роботов от 50 производителей. С нами сотрудничают более 50 партнёров по всему миру, а тысячи пользователей выбирают RoboDK для решения своих задач.
Наши успехи
NASA
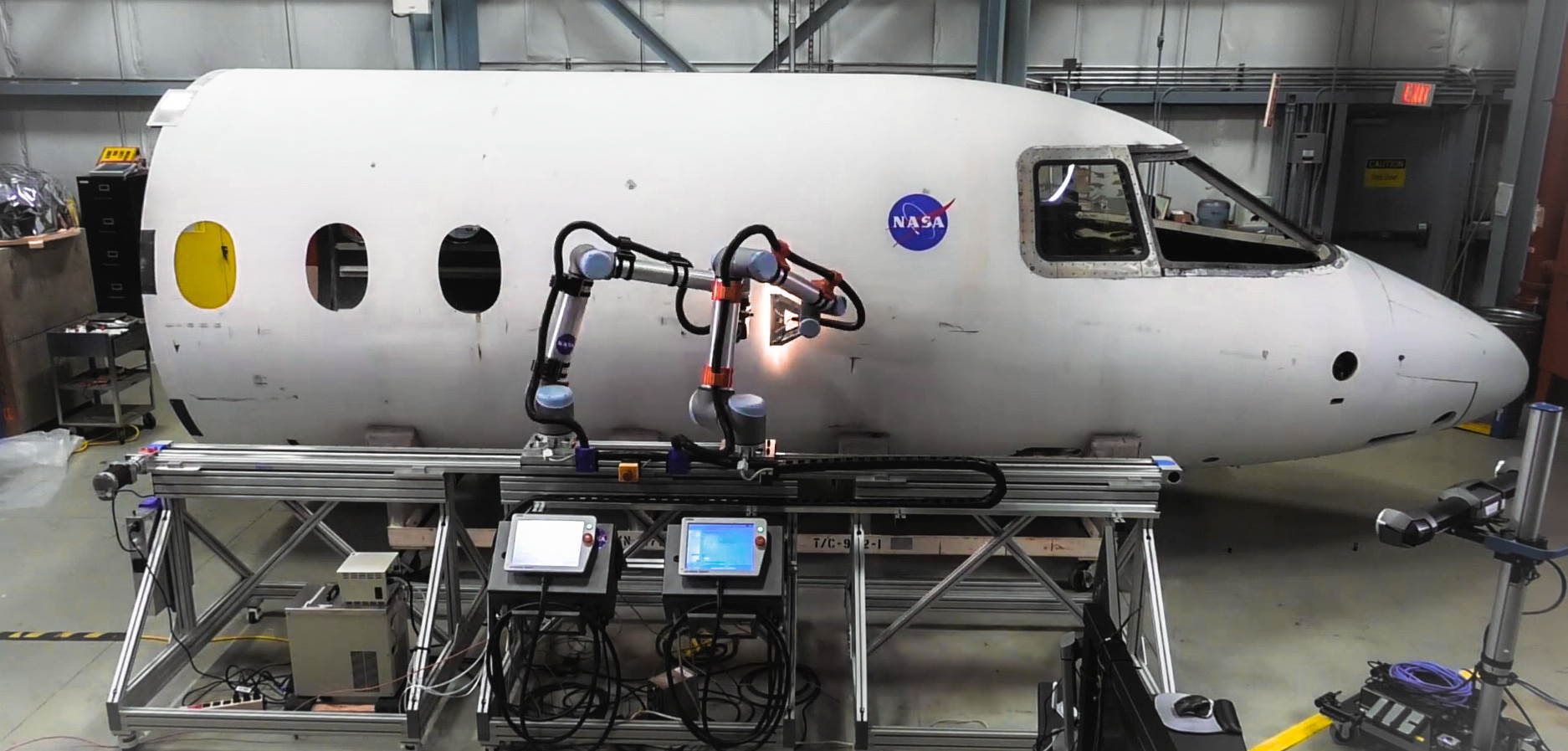
В 2017 году команда исследователей NASA из авиационной лаборатории Лэнгли в штате Вирджиния (США) работала над созданием системы автоматического инспектирования фюзеляжей из композитных материалов.
В этом процессе использовался коллаборативный робот UR10 фирмы Universal Robots, а моделирование и автономное программирование осуществлялось в программной среде RoboDK.
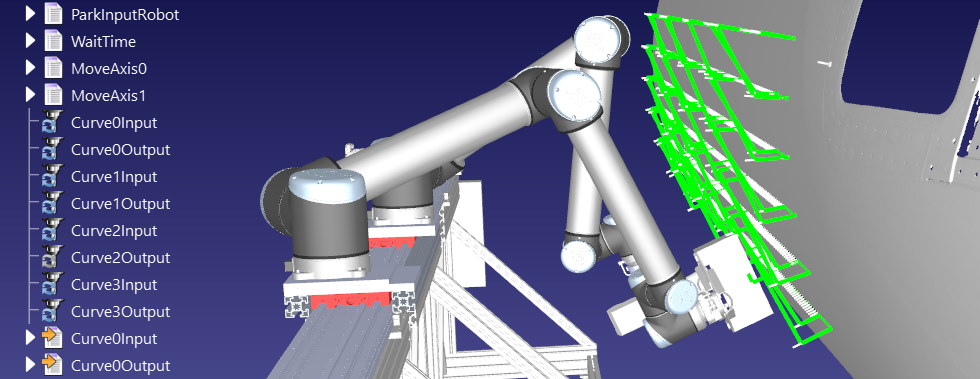
В 2019 году, опираясь на успех изначального проекта, была представлена мультироботизированная система инспектирования, которая состояла уже из двух роботов для проведения томографической проверки фюзеляжей самолетов.
RoboDK был спроектирован для выполнения подобных задач, требующих налаживания взаимодействия между разными программными компонентами. Это позволило исследователям синхронизировать двух роботов и подключить внешние оси.
Spotify
Нью-Йоркская студия художественного и цифрового дизайна Neoset Designs в рамках сотрудничества с музыкальным стриминговым сервисом Spotify участвовала в проекте по созданию скульптур RapCaviar Pantheon.
Используя возможности роботизированного фрезерования в RoboDK, команда художников смогла изготовить три больших статуи выдающихся рэп-исполнителей всего за 15 дней.

Самолёт
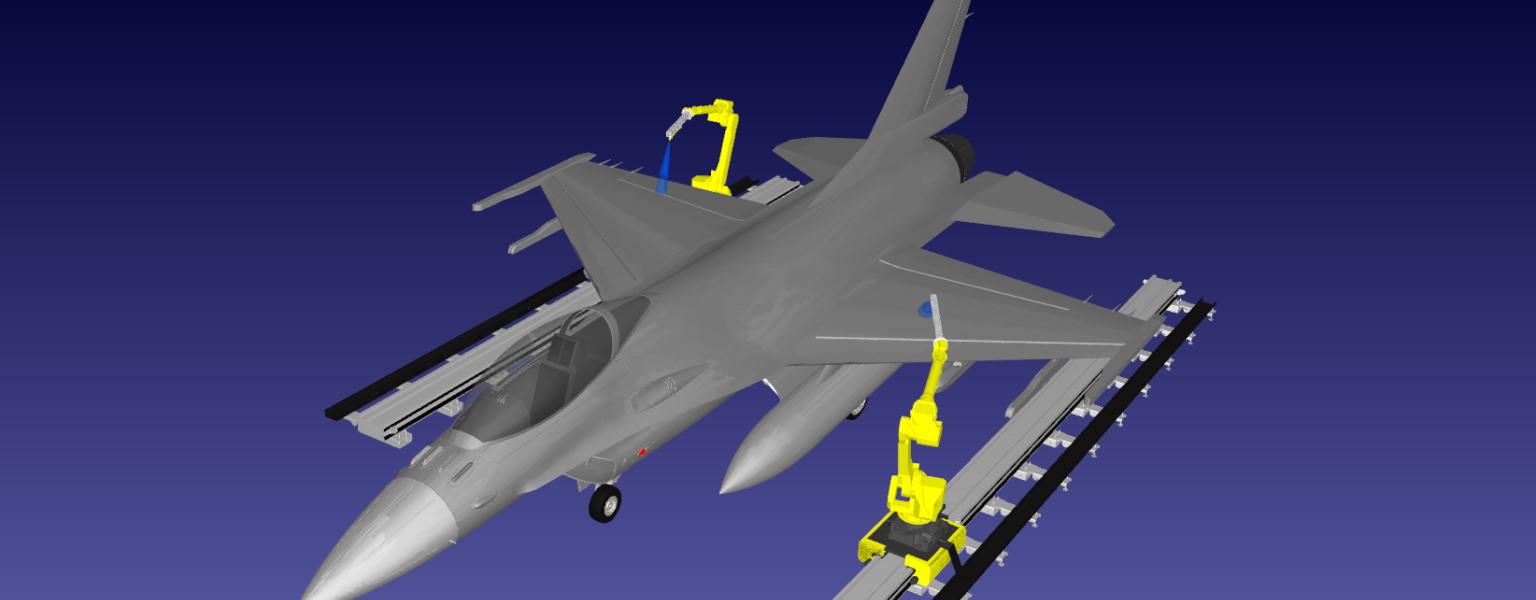
Компания Wilder Systems, поставщик средств автоматизации из города Остин в штате Техас (США), разработала первую в мире систему «сквозной» мойки летательных аппаратов, используя RoboDK для моделирования и программирования роботов.
Система была оборудована двумя 6-осевыми роботами-манипуляторами, установленными на линейных осях и синхронизированными с помощью ПЛК.
Для синхронизации обоих роботов был также использован модифицированный постпроцессор.
Весь цикл роботизированной мойки выполнялся за 52 минуты, в то время как ручная мойка требовала 16 человеко-часов. Таким образом, экономия времени составила порядка 95%.

Картеры
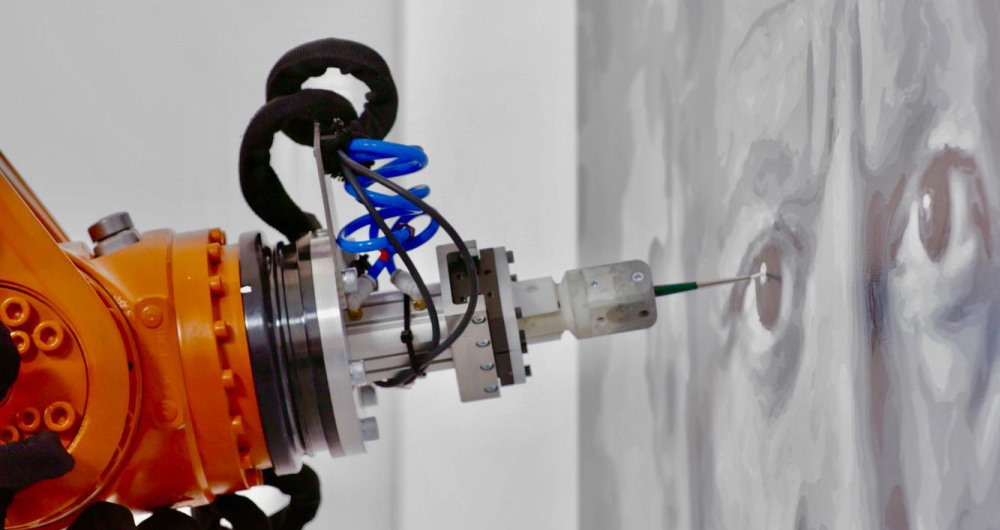
Художники Роб и Ник Картеры выбрали RoboDK для своего новаторского проекта Dark Factory Portraits, в котором промышленный робот-манипулятор, работая «вслепую» (без каких-либо устройств технического зрения), рисовал портреты известных художников.
Выставка их работ проходила в престижной галерее Ben Brown Fine Arts в Лондоне с 12 февраля по 17 апреля 2020 года.
Хронология
| 2015 | Компания RoboDK работала с первым заказчиком из Новой Зеландии, который использовал наш продукт для настройки робота ABB в режиме фрезерования. |
|---|---|
| 2016 | Вместе с новыми партнёрами и заказчиками мы работали над улучшением программного продукта. |
| 2017 | Вышла версия RoboDK 3.0 с новыми возможностями и приложениями. Исследователи NASA применили RoboDK для создания системы автоматического инспектирования фюзеляжей. |
| 2018 | В программу RoboDK было добавлено 4 новых расширения и возможности для роботизированного сверления. |
| 2019 | В RoboDK появились функции автоматического определения столкновений, внедрены поддержка систем виртуальной реальности (VR) и система разработки программного кода VSCode. Исследователи NASA опубликовали результаты создания системы автоматического инспектирования. |
| 2020 | Были созданы версии RoboDK для платформ Android, iOS и Raspberry Pi. Таким образом, наш продукт стал единственной системой полнофункционального моделирования и программирования роботов, работающей на мобильных устройствах. |
| 2021 | Компания RoboDK выпустила TwinTrack — продукт, реализующий революционные способы создания цифрового двойника и программирования роботов путём ручной демонстрации требуемых действий. |
| 2022 | Вышла облегчённая версия RoboDK — RoboDK for Web, работающая прямо в веб-браузере. |
| 2023 | Был представлен электронный каталог расширений RoboDK, предоставляющий доступ к различным надстройкам программы для решения специфических задач. |
Наша команда
А́лберт Нубиола
генеральный директор
Флор Ка́шера
ведущий маркетолог
Фи́липп Мэй
разработчик
Дэ́ниэл Хикки
управление персоналом
Щаоин Гуа́н
техническая поддержка
Сэ́мюэл Бертран
технический директор
Оливье Алла́р
разработчик
Джейсон Лун
разработчик
Алехандро Си́льва
техническая поддержка
Дмитрий Лавыгин
разработчик
Сергей Каниве́ц
техническая поддержка
Сильвия Кали́с
маркетолог
Янн Мак-Вейю
разработчик